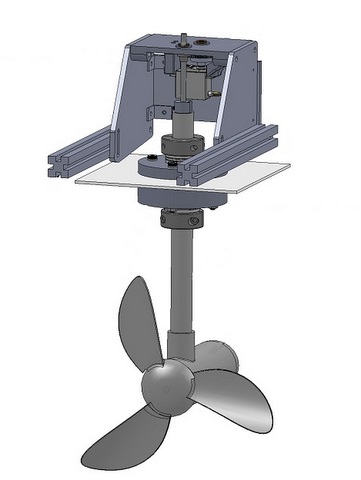
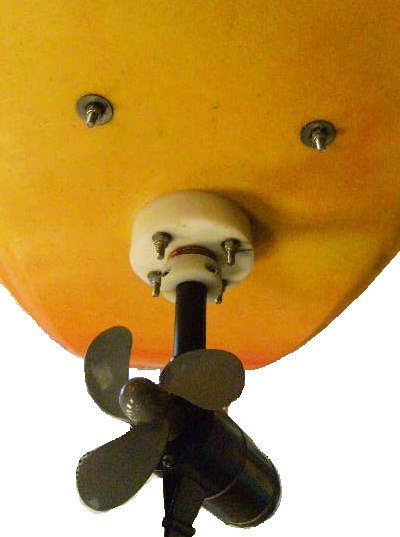
This autonomous kayak is designed as a platform for research in large-scale marine autonomy.
To that end, a heavy emphasis was placed on The kayak hull is fitted with a swivelling thruster for propulsion and steering. Electrical and computational components provide control, sensing, communication, and power. Several kayaks are currently being used with research in the optimization of underwater acoustic communication networks. For more information:
|
 |
|
 |
 |
 |