| Hull |  |
 |
| A white-water kayak is used as the platform for the autonomous vehicle. The kayak is six feet in length and is designed for paddlers of up to fifty kilograms. | ||
| Propulsion | ||
| The kayak is powered by a trolling motor attached near the bow. The foreward location provides passive stability in yaw, which is enhanced with skegs attached towards the stern. The thruster rotates to provide steering. | ||
| Mounting the thruster | ||
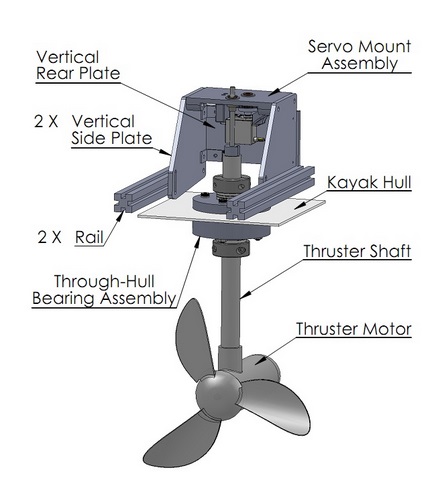
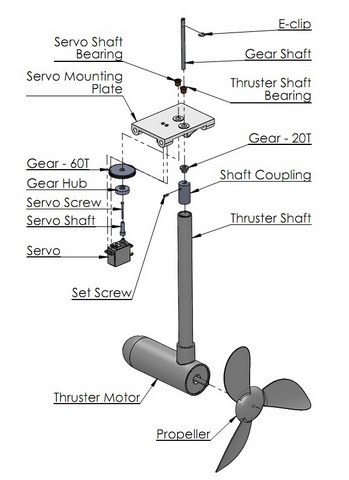
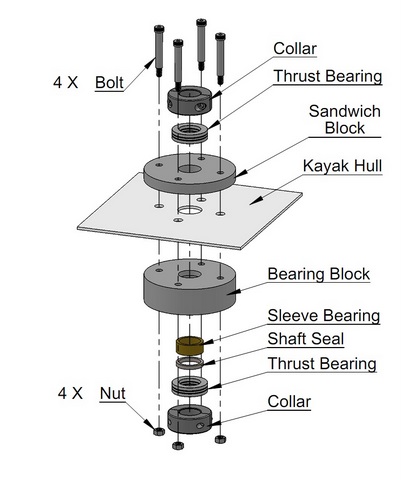
Two aluminum rails run lengthwise along the inside of the hull. These rails are securely attached and sealed, and serve as a mounting point for the thruster and other equipment. To pass the thruster through the hull, two blocks are machined which hold a sleeve bearing and shaft seal. One block sits on the outside of the hull and the other on the inside. The blocks are bolted together, clamping them to the hull. This provides rigidity to the bearing, which constrains the thruster shaft radially. Collars are attached to the shaft for axial constraint. The second radial constraint on the shaft is located near the servo motor that rotates the thruster. The sleeve bearing and servo are attached to a 3D printed part, which provides the proper spacing for the gears that transmit power to the shaft. The servo mounting plate is attached to aluminum plates which are mounted vertically to the rails. This design allows easy removal of parts, without affecting other parts of the assembly. Also, because both radial constraints of the shaft are attached to the bottom of the kayak, when the hull deforms in waves and collisions, the bearings move together, thereby maintaining their alignment and preserving the watertight seal. |
||
White-water kayak and azimuthing thruster |
Thruster Assembly |
|
 |
 |
|
Thruster and servo mount assembly
|
Through-hull seal and bearing assembly
|
|