This thesis presents the design and fabrication of a 2-DOF robotic leg using linear Lorentz-force actuators arranged in a parallel configuration. The decision to use linear actuators, a parallel architecture, and Lorentz-force motors was made because of distinct differences between these designs and the alternatives, notably, their lower weight, better resolution, and high bandwidth. We have shown that a robot of this construction can jump at least three times as high as the stroke length of its actuators, recording a maximum jump height of 48 mm using a stroke of 15 mm. This finding supports the feasibility of a larger robot based on this design. For more information
|
|
High-speed Video of Jump |
|
 |
 |
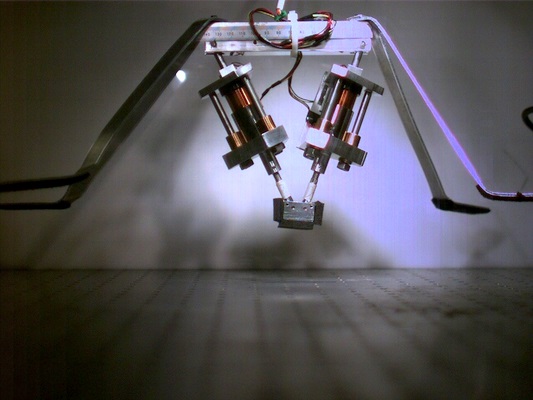
Robot at peak of jump |
SolidWorks CAD Model |